- 产品
- |
- 电子控制单元 (ECU) 软件和服务
- |
- 利用EB tresos配置Classic AUTOSAR工程
- |
- Classic AUTOSAR基础软件(BSW)
Classic AUTOSAR基础软件 (BSW)
EB tresos基础软件
EB tresos 基础软件模块保证了 ECU 的基本运行。它遵循 AUTOSAR 标准定义的硬件抽象一致性方法,包括基础的标准服务(例如通信)、诊断服务以及内存和模式管理。
目前提供两种基础软件(BSW):
- AutoCore
- OsekCore
行业领先且符合AUTOSAR标准的基础软件
EB tresos AutoCore是符合汽车开放系统架构AUTOSAR标准的汽车电子控制单元(ECU)基础软件,在行业中处于领先地位。该多功能解决方案基于AUTOSAR R20-11。它提供了模块化和可扩展的框架,为开发创新的ECU软件应用提供了完善的软件基础。
扩展质量声明
包括操作系统(OS)和RTE的质量和指标报告以及安全应用指南。质量和指标报告提供了关于需求跟踪、测试报告、静态和动态代码分析的信息。这一信息可用于支持功能安全等级ASIL B的安全验证。
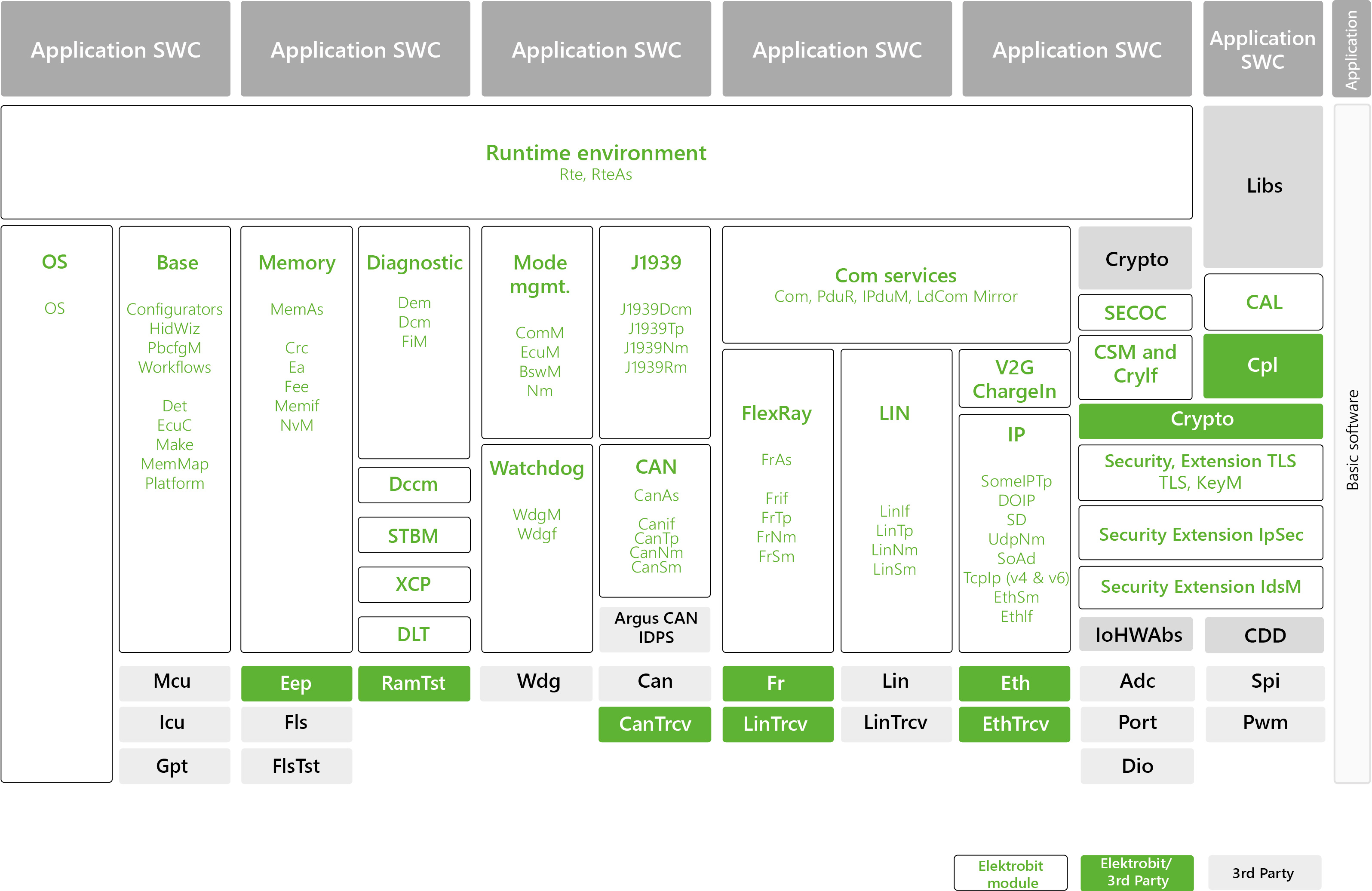
EB tresos AutoCore基础软件架构
完全可扩展
我们的系统可以通过特定客户的软件模块进行扩展。您可以整合自己的IP、附加价值,并在EB tresos AutoCore的基础上创建自己的致胜解决方案。
灵活的系统
EB tresos AutoCore基于最新的汽车开放系统架构AUTOSAR R20-11规范,支持各种汽车通信网络,例如CAN、CAN FD、LIN、FlexRay、OBDonUDS、J1939和以太网。各个AutoCore 模块被分为独立于硬件和依赖于硬件的产品。这就意味着您在同一个系统上的投入可以获得多种方式的回报。
可及时响应行业趋势
我们的基础软件已针对自动驾驶等场景做好了准备,这些场景需要具备高性能多核的汽车域控制器。它具有汽车开放系统架构AUTOSAR的灵活性,结合了功能安全概念和以太网网络,以满足越来越多的汽车传感器所需的数据传输量。
EB tresos AutoCore的关键特性
针对独立于硬件产品的EB tresos AutoCore Generic(ACG)
其架构主要包括:
- 基础软件包: 提供其他任何ACG产品所需要的EB tresos AutoCore主要基础架构。它包含辅助和插件。
- 运行时环境: 提供可扩展且高度优化的AUTOSAR运行时环境(RTE)。 AUTOSAR RTE可支持应用程序软件组件之间的通信,并提供应用软件组件和基础软件模块之间的主接口。
- 通信服务: 包括用于车载网络通信的AUTOSAR通信服务。这些服务为车载网络提供了一个独立于所使用的通信协议的统一接口。每个AUTOSAR通信协议都需要这些服务。我们会针对各个通信要求,提供一个CAN、LIN、FlexRay、J1939或者包含特定网络通信的以太网协议栈。它们与通信服务共同形成了一个可靠的解决方案,适用于所有类型的车载网络。我们通过以下格式之一,确保实现有效的数据转换,也就是将信号映射到PDU:
基于信号的格式会产生高密度的PDU——针对CAN、FlexRay和LIN进行优化。
通用数据序列化格式(AUTOSAR 4.2版本的新功能),针对车载以太网进行了优化。 - 诊断协议: 包含诊断专用的AUTOSAR模块。它们提供了统一诊断服务(UDS)的AUTOSAR兼容实施,以供外部诊断工具在开发、制造和维护期间使用。它还包括一个支持车载诊断(OBD)协议和OBDonUDS诊断标准的扩展。
用于依赖硬件产品的EB tresos AutoCore Microcontroller-dependent (ACM)
其架构主要包括:
- 操作系统. 我们会针对每个汽车电子控制单元(ECU)项目,提供基于最新的AUTOSAR版本的正确操作系统,如果需要,我们还可以根据ISO 26262的功能安全要求,达到ASIL D的安全等级。我们所有行业领先的操作系统都可以无缝集成到EB tresos AutoCore中。 了解更多
- 微控制器抽象层(MCAL). MCAL包括与µC相关的AUTOSAR模块。我们与NXP和英飞凌等领先的半导体制造商紧密合作,确保我们的软件在最新的微控制器上运行。
用于符合OSEK/VDX标准的ECU解决方案
EB tresos OsekCore是我们用于符合OSEK/VDX标准的电子控制单元(ECU)的基础软件包。
自1999年以来,我们一直在开发ECU基础软件,并在量产项目中实施了EB tresos OsekCore。该产品根据用于嵌入式操作系统、通信协议和网络管理的OSEK和VDX*标准开发而成。
*汽车分布式执行标准 Vehicle Distributed eXecutive

符合OSEK/VDX标准的ECU基础软件架构
可扩展解决方案
您将获得在多总线网络环境中运行复杂控制策略的可扩展解决方案。它是一个完全集成的软件包,可根据您的个人项目需求进行配置。
可靠的量产实施
包括车载OS(操作系统)、CAN、LIN和具有诊断服务和汽车电子控制单元(ECU)模式管理的启动加载。
充分的项目支持
我们为整个嵌入式软件生命周期提供充分的工程服务,例如规范、实施、公司特定软件模块的集成(可选)以及移植到特定微控制器。
全面的工具支持
EB tresos OsekCore的模块使用EB tresos Studio进行配置、验证和生成,这意味着每个模块都有自己的编辑器(可选)和通用图形用户界面。
EB tresos OsekCore关键特性
EB tresos OsekCore OS
面向特定汽车制造商的实施方案
通信协议
我们的OsekCore通信协议已在许多量产应用中得到验证,例如车身控制系统、气候控制系统和无线电导航系统。它们符合以下标准:
- CAN协议:OSEK-COM 3.0.3、OSEK-NM 2.5.2、ISO-TP 15765-2 和 ISO-UDS 14229-1。
- LIN 协议:LIN规范2.0、2.1和2.2A,以及ISO-UDS 14229-1。支持主模式和从模式。
- CAN Bootloader:符合 OSEK-COM 3.0.3、ISO-TP 15765-2 和 ISO-UDS 14229-1 标准。
关于Elektrobit的Classic AUTOSAR基础软件解决方案的更多信息