
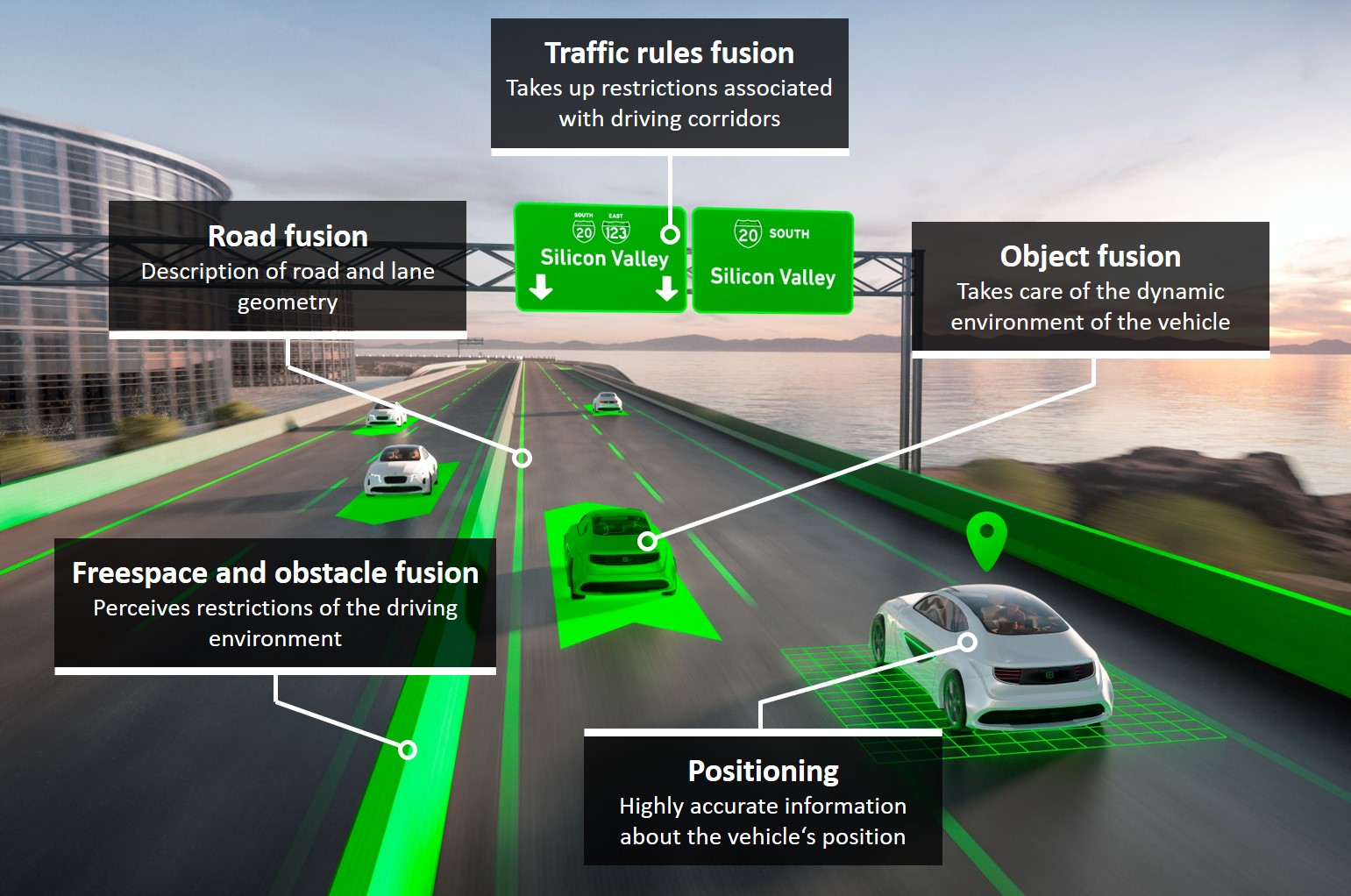
创建车辆周围环境全面视图
自动驾驶功能和系统,从简单的车道保持到自动驾驶,都需要通过融合传感器数据获得一致的动态环境视图。针对汽车制造商的主要项目,我们设计关键模块,为自动化汽车创建环境模型。通过这种方式,您可以非常轻松地开发自适应巡航 (ACC) 或“高速公路领航”(highway pilot) 系统等不同驾驶功能,省时省力,成本低廉。
优势
实现各种驾驶功能的利器
用于创建环境模型的关键模块可以提供驾驶辅助功能,甚至包括自动高速公路驾驶或自动泊车,是您在驾驶功能开发领域快人一步的基石。
节省宝贵的时间,减少开支
由 EB 设计的模块让您能够专注于自动驾驶系统的差异化部分,减少上市所需时间。
通过定制化能力实现产品独特性
硬件无关构建模块让您能够增加测试深度,并可以轻松转移到不同的车辆平台和模型。高度的可配置性实现功能定制和产品独特性。经典算法和人工智能的完美结合实现了最大性能。
关键特性
- 与硬件和传感器无关
- 为功能开发人员提供简洁易用的 API
- 可集成到现有或新开发的 OEM 系统,作为 OEM 所开发功能的一部分
针对车辆全面环境视图的创建,我们设计的自定义模块包括:
与环境模型相关的产品/解决方案/服务
自动驾驶功能和系统批量生产所需的关键软件组件。
自动驾驶应用程序的精确定位信息。
可提供前方道路精准和最新信息的电子地平线解决方案。
与其他 EB 产品和服务的集成
EB Assist ADTF
在开发和测试阶段使用 EB robinos 组件的平台。
EB arware
支持创建可以增强驾驶体验的增强现实解决方案的软件产品。
ADAS 和自动驾驶工程服务
批量生产和道路经验解决方案、经过验证的标准以及最高可达 5 级的自动驾驶创新工程方法。