- 製品 & サービス
- |
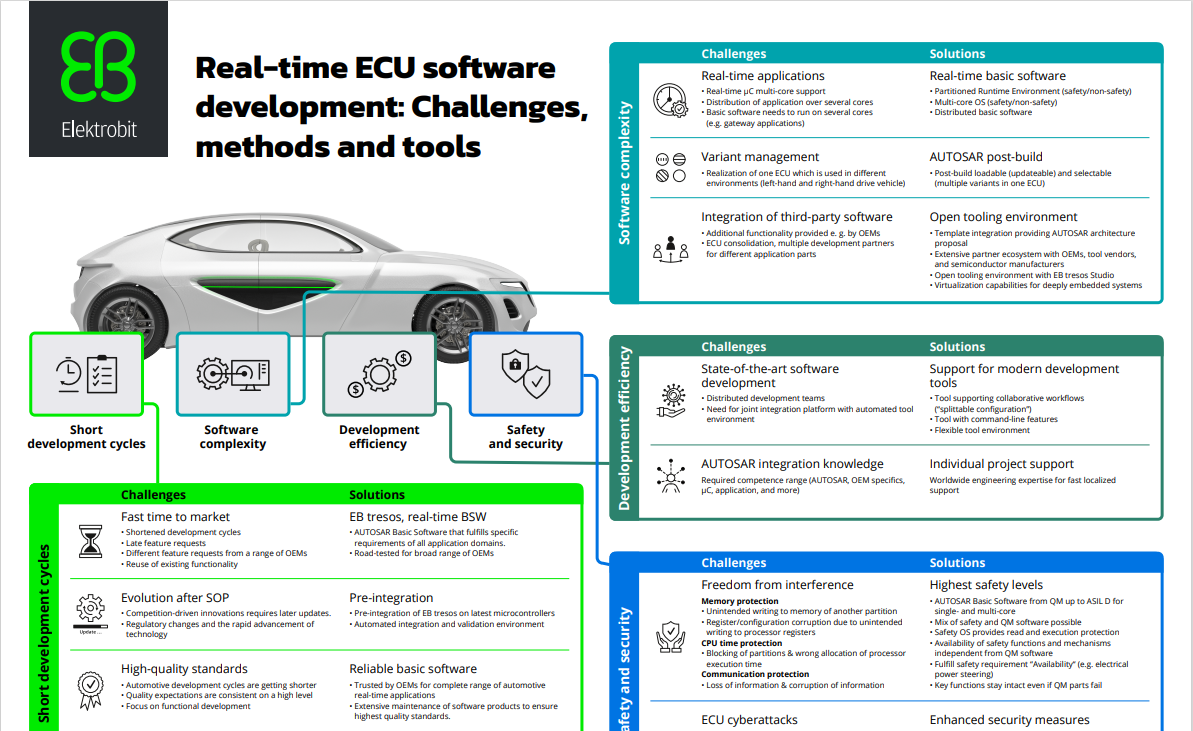
- 電子制御ユニット(ECU)ソフトウェアおよびサービス
- |
- EB tresos製品ラインナップ
- |
- EB tresos Classic..
Classic AUTOSARベーシックソフトウェア(BSW)
EB tresosベーシックソフトウェア
EB tresosベーシックソフトウェアモジュールはECUの基本動作を 保証します。実装は、AUTOSAR規格で定義されたハードウェア抽象化の一貫したアプローチに準拠しており、通信、診断サービス、メモリおよびモード管理などの基礎的な標準サービスを含みます。
2つのClassic AUTOSARベーシックソフトウェアオプション:
- AutoCore
- OsekCore
業界最先端のAUTOSAR対応ベーシックソフトウェア
EB tresos AutoCoreは、車載電子制御ユニット(ECU)向け、業界最先端のAUTOSAR準拠のベーシックソフトウェアを実装しています。この汎用ソリューションはAUTOSAR R20-11に対応しています。モジュール式で拡張性の高いフレームワークを提供し、画期的なECUソフトウェアアプリケーション開発のための完璧なソフトウェアベースです。
拡張品質ステートメント
OSとRTEの品質とメトリックスのレポートおよび安全アプリケーションガイドラインで構成されます。品質とメトリックスのレポートには、要件トレース、テストレポート、静的および動的コード分析に関する情報が記載されます。この情報を使用して、ASIL Bまでの安全性保証をサポートできます。
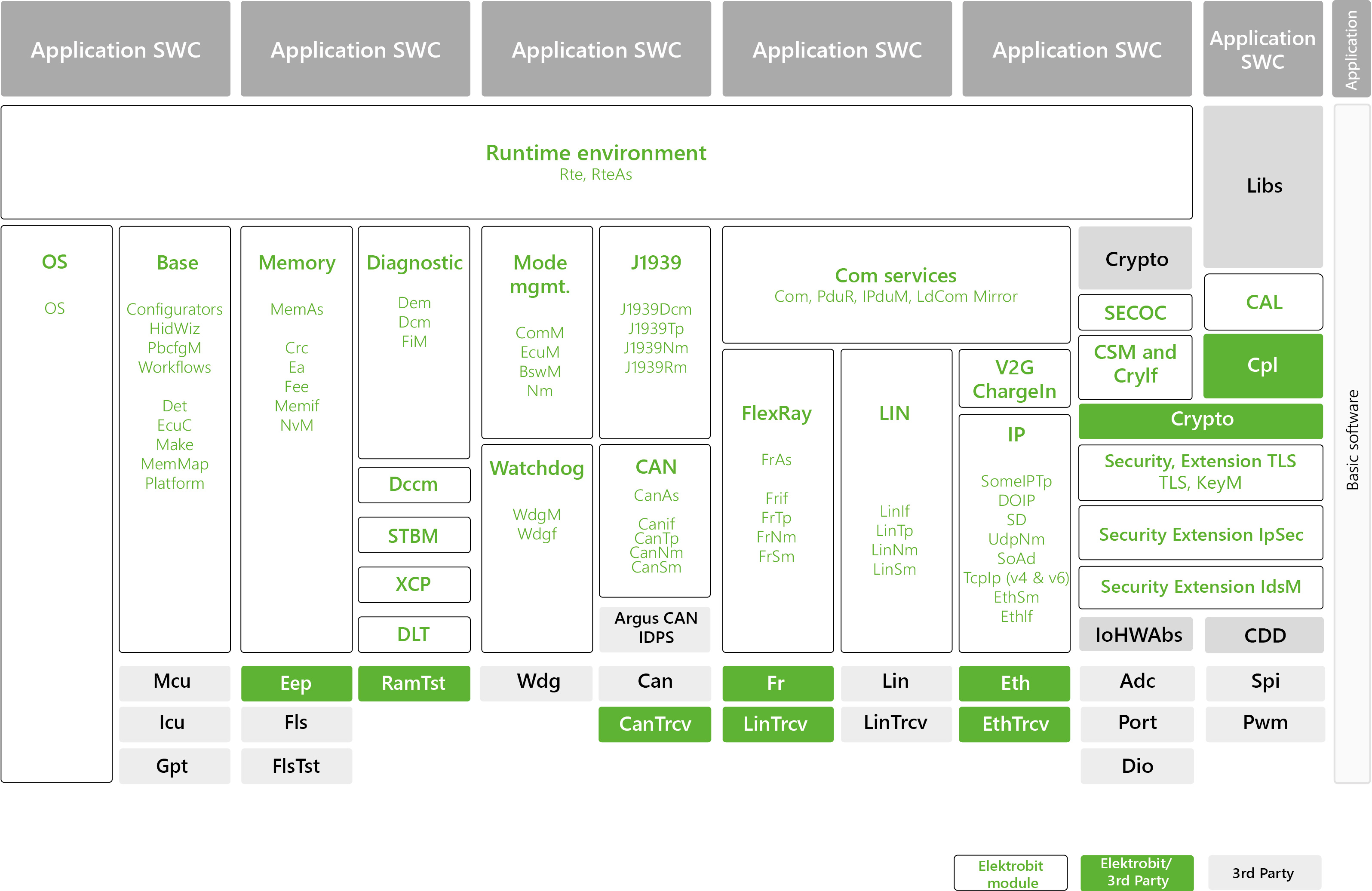
EB tresos AutoCoreアーキテクチャ
完全な拡張性
このシステムは、お客様固有のソフトウェアモジュールで拡張できます。EB tresos AutoCoreを作業するための確固たるベースとして使用して、IPの統合、価値の付加、独自の成功を導くソリューションの作成が可能です。
柔軟なシステム
EB tresos AutoCoreは最新のAUTOSAR R20-11規格に基づき、CAN、CAN FD、LIN、FlexRay、J1939およびEthernetなどあらゆる車載通信ネットワークをサポートします。AutoCoreの各モジュールは、ハードウェアに依存しない製品とハードウェアに依存する製品にグループ化されます。つまり、1つのシステムへの投資が複数の形で利益を生み出します。
業界のトレンド向けに実用化
エレクトロビットのClassic AUTOSARベーシックソフトウェアスタックは、マルチコアの高性能を備えた自動車ドメインコントローラを必要とする自動運転などのシナリオに対応しています。AUTOSARの柔軟性を備え、機能安全コンセプトならびにEthernetネットワークを統合して、増加している自動車センサーに必要なデータ転送ボリュームに対応します。
EB tresos AutoCoreの主な機能
ハードウェアに依存しない製品向けのEB tresos AutoCore Generic(ACG)
アーキテクチャの構成内容:
- ベース:他のACG製品が必要とする、EB tresos AutoCoreのメインインフラストラクチャを提供します。アシスタントとプラグインが含まれます。
- ランタイム環境:スケーラブルで高度に最適化されたAUTOSARランタイム環境(RTE)です。AUTOSAR RTEで、アプリケーションソフトウェアコンポーネント間の通信が可能になり、アプリケーションソフトウェアコンポーネントとベーシックソフトウェアモジュールとの間のメインインターフェースが提供されます。
- 通信サービス:車両ネットワーク通信用AUTOSAR通信サービスが入っています。これは、使用される通信プロトコルから独立して車両ネットワークとの統一感のあるインターフェースを提供するサービスで、あらゆるAUTOSAR通信スタックで必要とされます。各通信要件に対して、特定のネットワーク通信を含むCAN、LIN、FlexRay、J1939 あるいはEthernetスタックのいずれかを提供します。通信サービスと共に、あらゆるタイプの自動車ネットワークに対する信頼できるソリューションとなります。効率的なデータ変換、シグナルのPDUへのマッピングを、次のフォーマットで保証します。
シグナルベースのフォーマット:高密度のPDUになり、CAN、FlexRay、LIN向けに最適化されています。
汎用データシリアライズフォーマット(AUTOSARリリース4.2で新規導入)、車載用Ethernet向けに最適化されています。 - 診断スタック:診断に特化したAUTOSARモジュールが入っています。開発、製造、サービス業務中に外部診断ツールによって使用される、UDS(Unified Diagnostic Services)のAUTOSAR準拠の実装を提供します。また、OBD(オンボード診断)をサポートする拡張も含まれます。
ハードウェアに依存する製品向けEB tresos AutoCore Microcontroller-dependent(ACM)
アーキテクチャの構成内容:
- オペレーティングシステム各自動車ECUプロジェクト向けに、AUTOSARの最新リリースに基づき、また必要に応じてASIL Dまでの機能安全要件ISO 26262に準拠する、適切なOSを提供します。業界をリードするすべてのOSが、EB tresos AutoCoreにシームレスに統合可能です。詳細はこちら。
- マイクロコントローラ抽象化レイヤー(MCAL)MCALにはµCへのアクセスに関連するAUTOSARモジュールが含まれます。NXPやInfineonといった主要な半導体メーカーと緊密に協力して、エレクトロビットのソフトウェアが最新のマイクロコントローラで機能することを保証しています。
OSEK/VDX準拠のECU向けのソリューション
EB tresosOsekCoreは、OSEK/VDX準拠の電子制御ユニット(ECU)のClassic AUTOSARベーシックソフトウェアパッケージです。
エレクトロビットでは1999年以来、ECUベーシックソフトウェアの開発に携わっており、量産プロジェクトでEB tresos OsekCoreを実装しています。この製品は、組み込みOS、通信スタック、およびネットワーク管理のためのOSEK* およびVDX** 規格に準拠して開発されています。
* 自動車の電子機器用オープンシステムおよびインターフェース
** Vehicle Distributed eXecutive
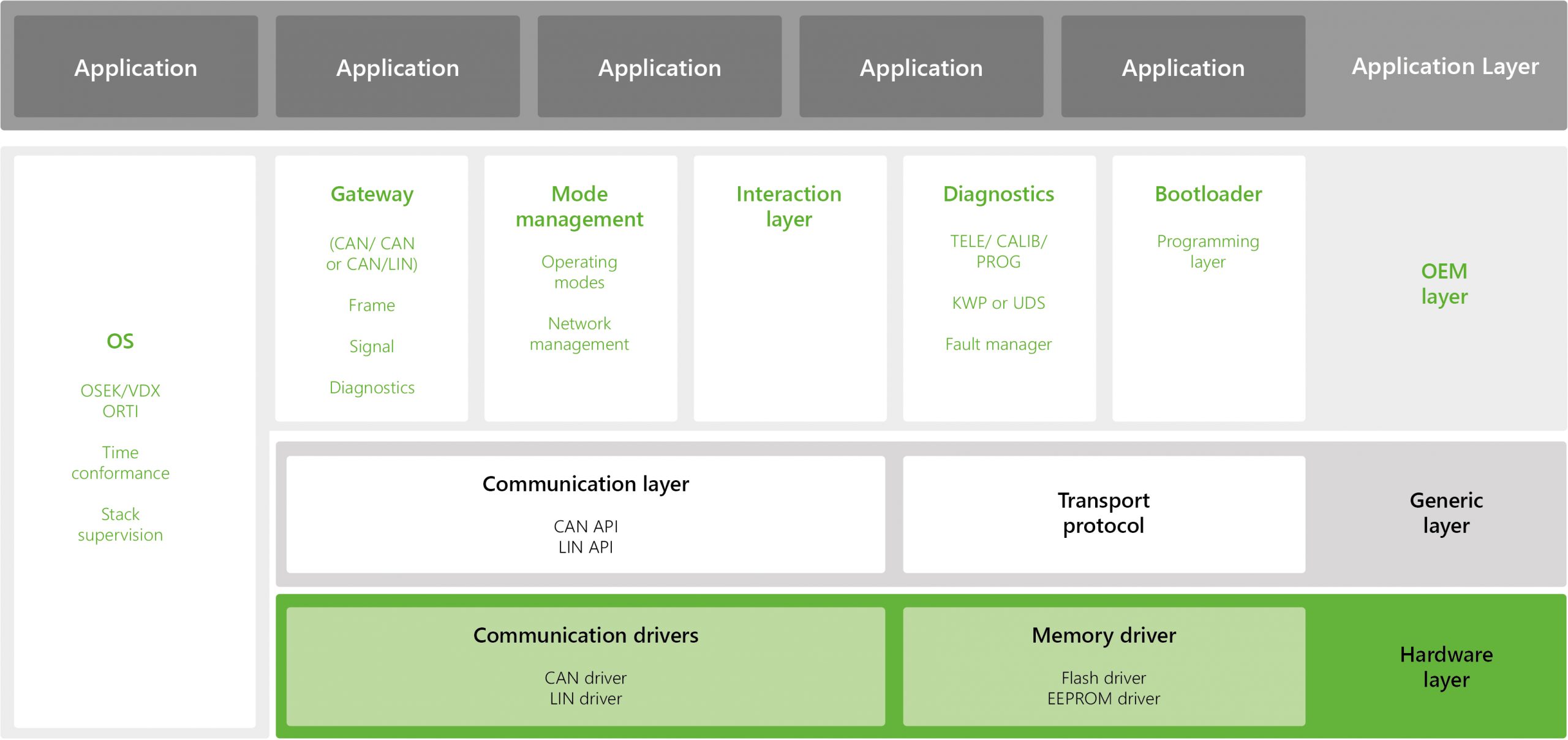
OSEK/VDX準拠電子制御ユニットのソフトウェアアーキテクチャ
スケーラブルなソリューション
マルチバスネットワーク環境で複雑な制御設計を実装するためのスケーラブルなソリューションが得られます。個別のプロジェクトのニーズに合わせて構成され、完全に統合されたソフトウェアパッケージとして提供します。
量産向けに信頼できる実装
OS(オペレーティングシステム)、CAN、LIN、診断サービスおよび電子制御ユニットのモード管理機能を備えたフラッシュブートローダーを含みます。
優秀な人材によるプロジェクト支援
仕様、実装、企業独自のソフトウェアモジュールの統合(オプション)、特定のマイクロコントローラへの移植など、組み込みソフトウェアの全ライフサイクルにわたって、適格なエンジニアリングサービスを提供します。
包括的なツール支援
EB tresos OsekCoreのモジュールは、EB tresos Studioで設定、検証、生成が行われます。つまり、各モジュールには独自のエディタ(オプション)と共通のGUIがあります。
EB tresos OsekCoreの主な機能
EB tresos OsekCore OS
自動車メーカー固有の実装
通信スタック
エレクトロビットのOsekCore通信スタックは、車体制御システム、空調システム、ラジオナビゲーションシステムなどの多くの量産アプリケーションで実証されています。準拠する基準:
- CAN通信スタック:OSEK-COM 3.0.3、OSEK-NM 2.5.2、ISO-TP 15765-2、およびISO-UDS 14229-1
- LIN通信スタック:LIN仕様2.0、2.1、2.2A、およびISO-UDS 14229-1マスターとスレーブの両方のモードがサポートされています。
- CANブートローダー:OSEK-COM 3.0.3、ISO-TP 15765-2、およびISO-UDS 14229-1に準拠。
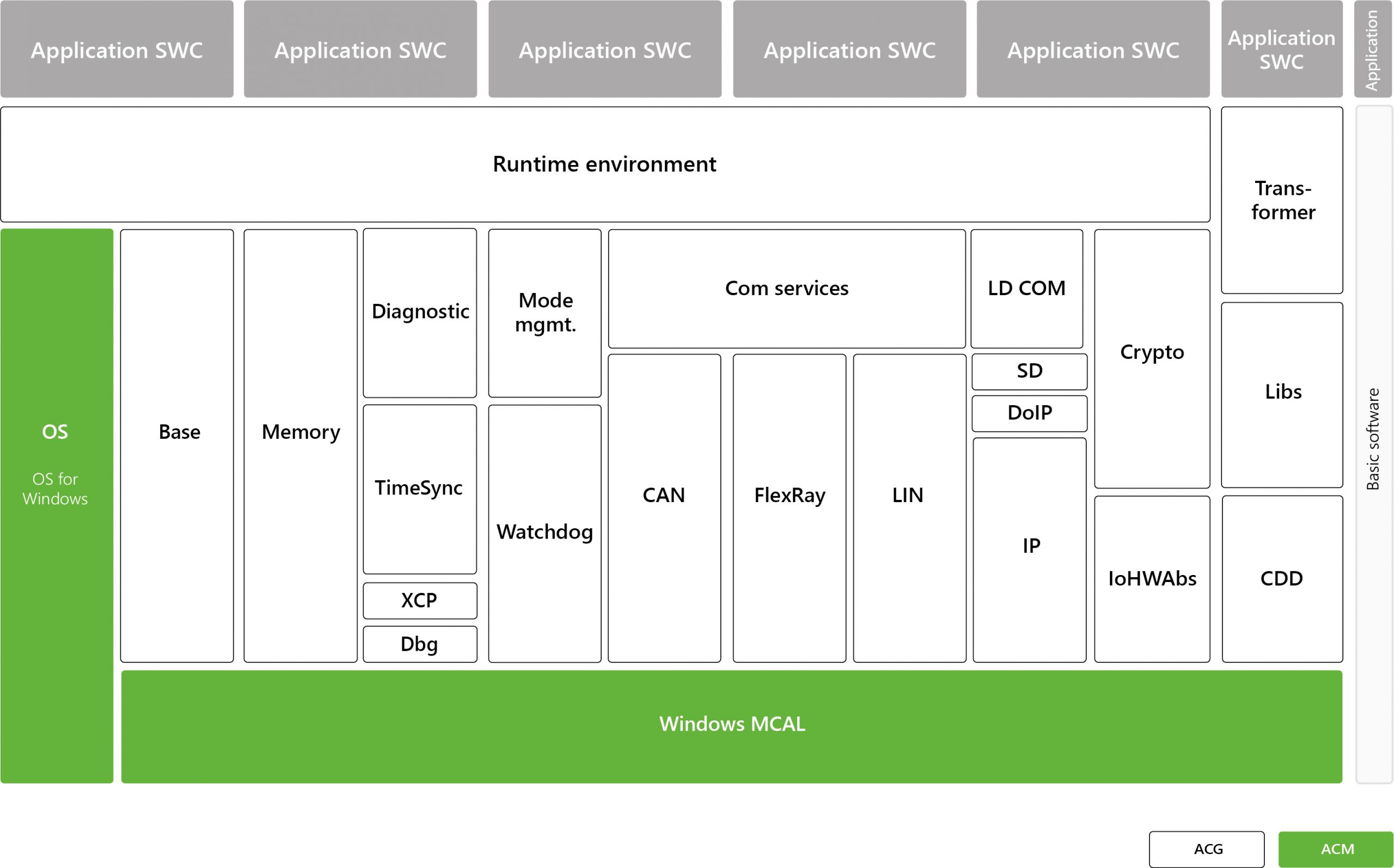
PCベースのAUTOSAR開発
お客様には、AUTOSARソフトウェアとその統合をできるだけ早期かつ迅速にテストできるようになっていただきたいと考えています。そのため、エレクトロビットは仮想Classic AUTOSARベーシックソフトウェアであるEB tresos WinCoreを開発しました。これはWin32プラットフォームで実行されます。つまり、ハードウェアなしでも電子制御ユニット(ECU)ソフトウェアプロジェクトを開始して、PCで直接アプリケーションを実行できます。
拡張品質ステートメント
OSとRTEの品質とメトリックスのレポートおよび安全アプリケーションガイドラインで構成されます。品質とメトリックスのレポートには、要件トレース、テストレポート、静的および動的コード分析に関する情報が記載されます。この情報を使用して、ASIL Bまでの安全性保証をサポートできます。
エレクトロビットClassic AUTOSARベーシックソフトウェア(BSW)関連コンテンツ