
The automotive industry is shifting from hardware-defined architectures to software-defined vehicles (SDVs), which is reshaping how development teams design, deploy, and maintain vehicle software.
As with many SDV development teams, countless days are spent navigating the limits of legacy real-time operating system (RTOS) platforms. Adding a new cockpit feature or integrating cloud-connected services often requires juggling complex dependencies while ensuring functional safety compliance.
Every change carries the risk of delays, costly rework, or slow integration cycles. Teams face the challenge of meeting modern expectations while working on platforms designed decades ago for fixed ECU functions. Even small improvements in flexibility, safety compliance, or workflow efficiency can make a measurable difference and help establish a path toward scalable, software-defined architectures.
Where legacy proprietary platforms begin to struggle
Legacy RTOS platforms carry along with them a rigid heritage. These systems were created to run isolated workloads on fixed hardware and adapting them to dynamic SDV architectures can require significant effort. Modern development practices like containerization, cloud integration, and continuous integration pipelines are often difficult to implement.
We must also not overlook the fact that developer ecosystems are constrained. Often, the talent entering the market today is trained on Linux-based workflows and open-source ecosystems. Proprietary environments create a smaller pool of developers, which can slow development and limit long-term maintainability.
Updates and maintenance can also pose challenging hurdles, as proprietary models rely on vendor schedules for security patches and functional improvements. Teams may spend more time managing platform constraints than building new functionality, creating a real bottleneck in SDV development.
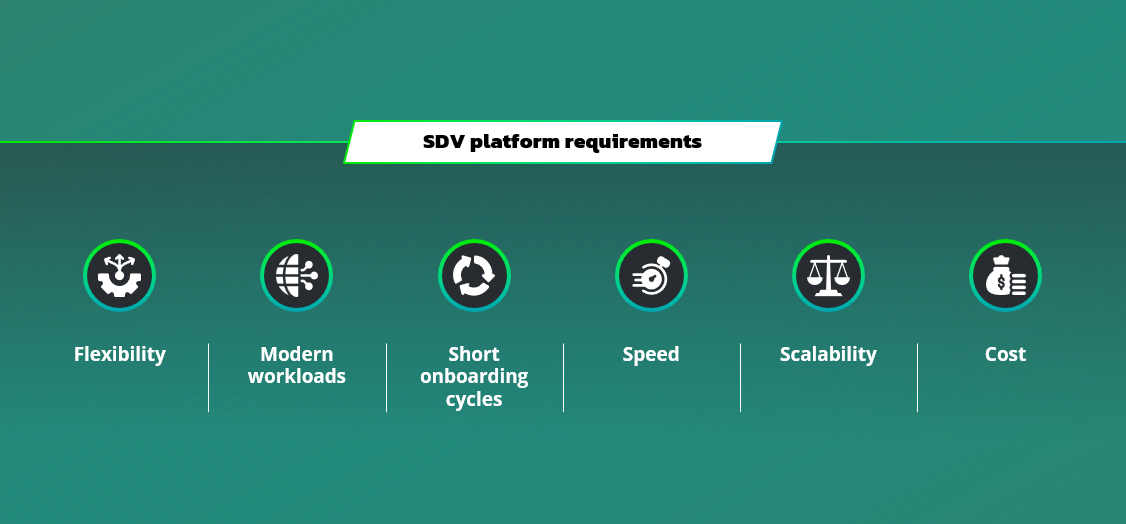
The modern demands of SDVs
SDVs are inherently dynamic, and require continuous software updates, secure over-the-air delivery, and scalable architectures for high-performance computing. Functional safety must be met without compromising openness, flexibility, or developer productivity.
Teams will perform better when they get what they expect; modern workflows, including cloud-based development, container orchestration, and CI/CD pipelines. Platforms must handle a mix of safety-critical and non-safety workloads efficiently. While legacy RTOS platforms can provide some functional safety capabilities, achieving the level of speed, flexibility, and scalability required for SDV programs often proves difficult.
The question then becomes clear: can a platform designed for static, isolated workloads keep up with the expectations of modern software-defined vehicles?
How EB corbos Linux for Safety Applications meets these demands
EB corbos Linux for Safety Applications provides a foundation designed for today’s SDV environment. Its open-source approach gives teams access to a broad ecosystem, modern workflows, and collaborative tools, supporting development without the constraints of older systems.
It is ISO 26262 ASIL B compliant, with TÜV Nord confirming correctness, completeness, and freedom from interference. Cybersecurity is enhanced through a transparent, community-driven model. This means vulnerabilities can be identified and addressed faster than in closed, proprietary environments, helping teams maintain a robust security posture.
Additionally, EB corbos Linux for Safety Applications was developed with built-in cybersecurity ISO/SAE 21434 measures, helping automotive customers meet regulatory expectations and defend against evolving cyber threats throughout the vehicle lifecycle. Immediate defect notifications align with our commitment to industry security practices.
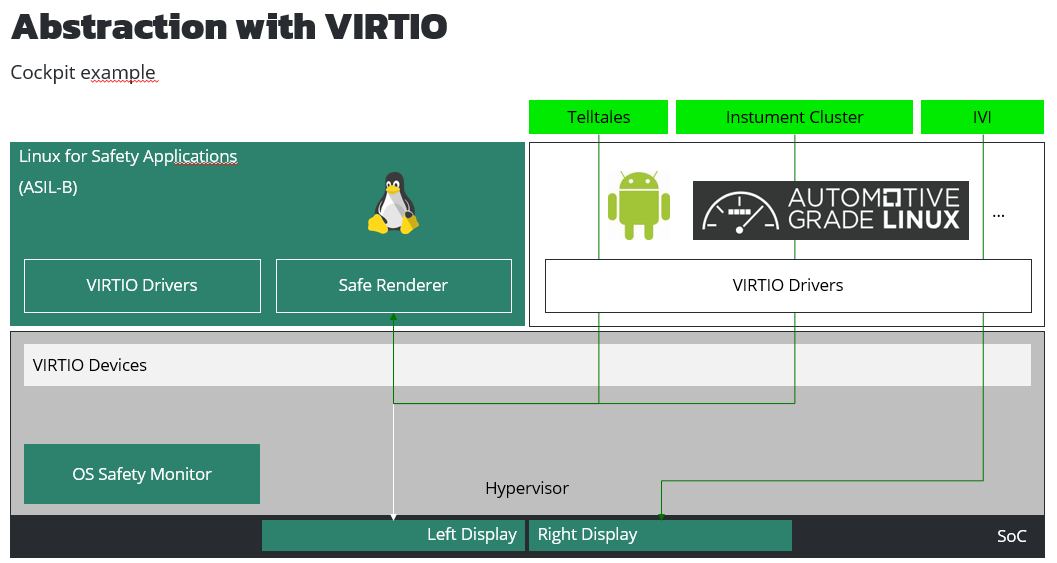
The architecture supports virtualization, containerization, and cloud-to-car workflows. Teams can reuse shared components, leverage community-supported tools, and reduce duplication, lowering development time and costs while maintaining safety and reliability.
The path forward
Indeed, legacy RTOS platforms were essential for earlier generations of vehicles, but the era of software-defined vehicles requires more. Flexibility, scalability, modern workflows, and the ability to balance safety and non-safety workloads are no longer optional.
By taking small, practical steps, SDV teams can experience early wins that demonstrate the value of modern architectures, and this will help build confidence in scalable, software-defined approaches. Even incremental improvements create measurable benefits in workflow efficiency, integration speed, and overall system flexibility.
Yes, our industry is evolving at a fast pace, and software platforms must evolve equally as fast. Establishing a foundation that supports both current and future SDV requirements allows teams to focus on innovation rather than workarounds.
It’s modern open-source platforms providing a way to meet functional safety and cybersecurity requirements while embracing the dynamic, complex nature of the next generation of vehicles.
Ready to dig deeper? Check out how open-source software powers the future of SDV here.
Author

Isaac Trefz
Senior Product Manager, HPC Solutions

