- Products
- |
- AUTOSAR software solutions..
- |
- EB tresos product..
- |
- EB tresos Classic..
Classic AUTOSAR Basic Software (BSW)
EB tresos AUTOSAR Basic Software (BSW)
The EB tresos AUTOSAR Basic Software (BSW) modules ensure the ECU’s basic operation. The implementation follows the consistent approach of hardware abstraction as defined by the AUTOSAR standards and includes fundamental standard services such as communication, diagnostic services as well as memory and mode management.
Two Classic AUTOSAR Basic Software (BSW) options are available:
- AutoCore
- OsekCore
Industry-leading AUTOSAR-compliant basic software
EB tresos AutoCore is an industry-leading implementation of AUTOSAR-compliant basic software for automotive electronic control units (ECUs). This versatile solution is based on AUTOSAR R20-11. It provides a modular and extensible framework and is a perfect software base for developing innovative ECU software applications.
Extended quality statement
Consists of quality and metrics report as well as safety application guidelines for the OS and RTE. The quality and metrics report provides information on requirements tracing, test reports, static, and dynamic code analysis. The information can be used to support a safety argumentation up to ASIL B.
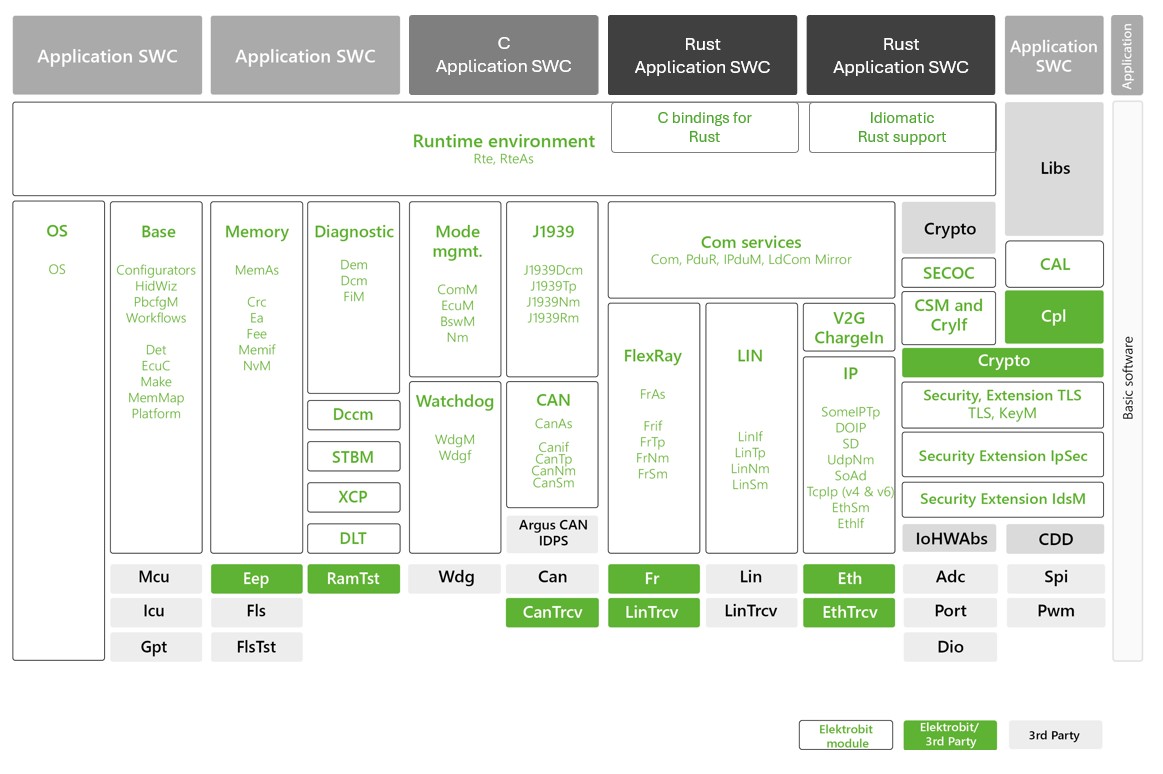
EB tresos AutoCore architecture
Full extensibility
Our system is extensible with customer-specific software modules. You can integrate your IP, add value, and create your own winning solutions using EB tresos AutoCore as a solid base to work from.
Flexible system
EB tresos AutoCore is based on the AUTOSAR R20-11 specification and supports all kinds of automotive communication networks, such as CAN, CAN FD, LIN, FlexRay, OBDonUDS, J1939, and Ethernet. The individual AutoCore modules are grouped into hardware-independent and hardware-dependent products. All of this means your investment in one system can pay off in multiple ways.
Road ready for industry trends
Our Classic AUTOSAR basic software stack is ready for scenarios such as autonomous driving, which requires car domain controllers with high multicore performance. It has the flexibility of AUTOSAR and incorporates functional safety concepts as well as Ethernet networks to address the data transfer volumes required by the increasing number of car sensors.
Key features of EB tresos AutoCore
EB tresos AutoCore Generic (ACG) for hardware-independent products
The architecture consists of:
- Base: Provides the main infrastructure for EB tresos AutoCore, required by any other ACG product. It contains assistants and plug-ins.
- Run-time environment: Provides a scalable and highly optimized AUTOSAR run-time environment (RTE). The AUTOSAR RTE enables communication between application software components and provides the main interface between application software components and the basic software modules.
- Communication services: Encompasses the AUTOSAR communication services for vehicle network communication. These services provide a uniform interface to the vehicle network, independent of the communication protocol used. The services are required in every AUTOSAR communication stack. For each communication requirement, we offer either a CAN, LIN, FlexRay, J1939 or Ethernet stack that includes the specific network communication. Together with the communication services, they form a reliable solution for all types of automotive networks. We ensure efficient data transformation, i.e. mapping of signals to PDUs, via one of these formats:
Signal-based format resulting in densely packed PDUs – optimized for CAN, FlexRay, and LIN.
Generic data serialization format (new with AUTOSAR release 4.2), optimized for Automotive Ethernet. - Diagnostic stack: Contains the diagnostic-specific AUTOSAR modules. They provide an AUTOSAR-compatible implementation of the Unified Diagnostic Services (UDS) to be used by external diagnostic tools during development, manufacturing, and service. It also includes an extension to support the on-board diagnostics (OBD) protocol and OBDonUDS diagnostic standard.
- Supported programming languages: The EB tresos AutoCore infrastructure supports both C and Rust as programming languages. This allows developers to reuse existing C code while having the freedom to choose between the two languages for the new code. RTE code will be generated for both C and Rust (simple plus idiomatic code). Both languages are supported by the build system.
Contact us to explore Rust with our workshop!
EB tresos AutoCore Microcontroller-dependent (ACM) for hardware-dependent products
The architecture consists of:
- Operating systems. For each automotive ECU project, we offer the right OS based on the latest AUTOSAR releases and, if required, in accordance with ISO 26262 for functional safety requirements up to ASIL D. All our industry-leading operating systems can be seamlessly integrated into EB tresos AutoCore. Learn more here.
- Microcontroller abstraction layer (MCAL). The MCAL includes the AUTOSAR module relevant to access the µC. We work in close cooperation with leading semiconductor manufacturers, such as NXP and Infineon, to ensure our software runs on the latest microcontrollers.
Your solution for OSEK-/VDX-compliant ECUs
EB tresos OsekCore is our Classic AUTOSAR basic software package for OSEK-/VDX-compliant electronic control units (ECUs).
We’ve been developing ECU basic software since 1999 and have implementations of EB tresos OsekCore employed in series-production projects. The product was developed according to the OSEK* as well as VDX** standards for embedded operating systems, communication stacks, and network management.
* German: Offene Systeme und deren Schnittstellen für die Elektronik in Kraftfahrzeugen; English: Open Systems and their Interfaces for the Electronics in Motor Vehicles
** Vehicle Distributed eXecutive
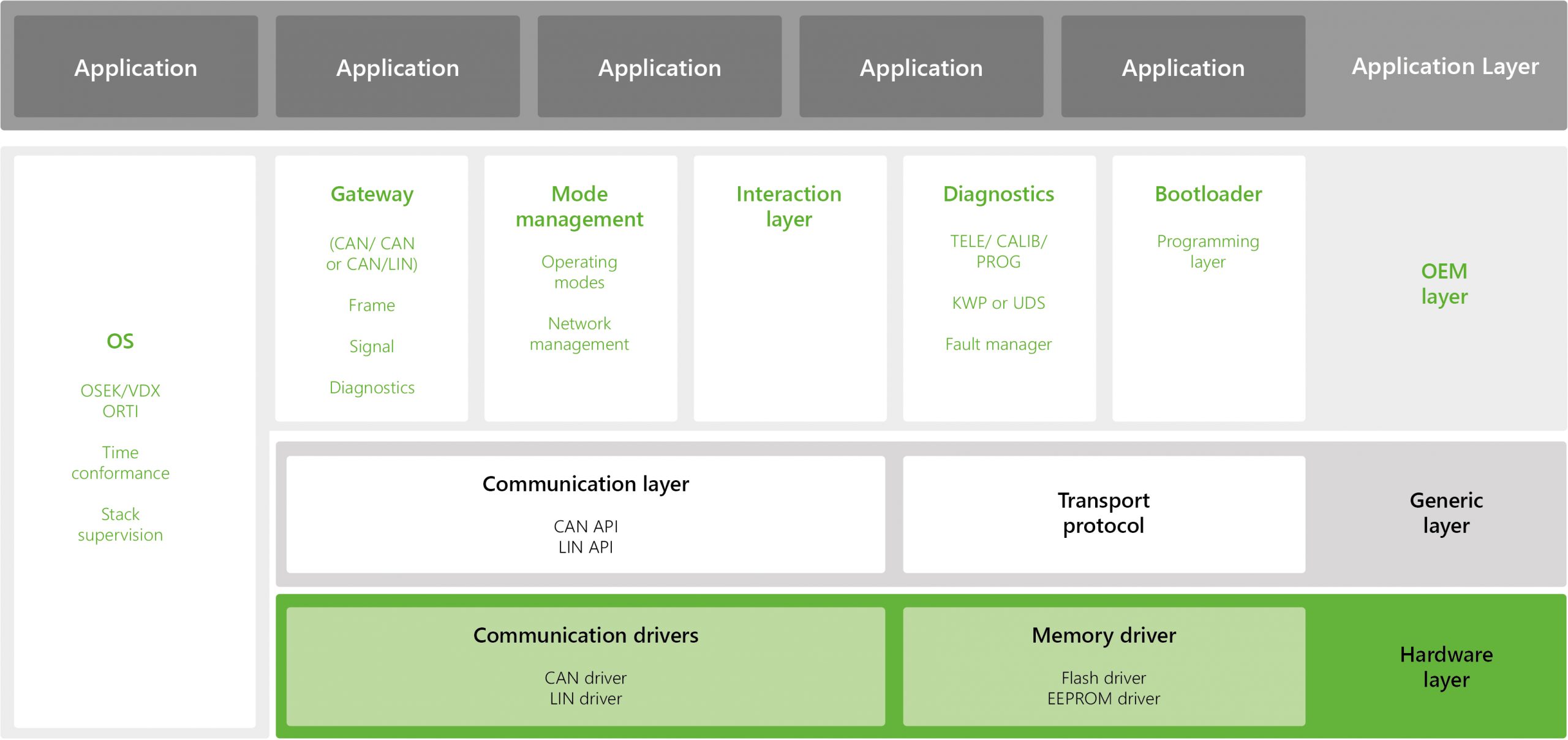
Software architecture of OSEK-/VDX-compliant ECU
Scalable solution
You get a scalable solution for running complex control strategies in a multi-bus network environment. It’s delivered as a fully integrated software package configured according to your individual project needs.
Reliable implementation for series production
… including an OS (operating system), CAN, LIN, and flash bootloader with diagnostic services and ECU mode management.
Competent project support
We provide competent engineering services for the whole embedded software life cycle, such as specification, implementation, integration of company-specific software modules (optional), and porting to specific microcontrollers.
Comprehensive tooling support
Modules of EB tresos OsekCore are configured, validated, and generated with EB tresos Studio, meaning that each module has its own editor (optional) and a common graphical user interface.
Key features of EB tresos OsekCore
EB tresos OsekCore OS
Carmaker-specific implementations
Communication stacks
Our OsekCore communication stacks are proven in many series-production applications such as body control systems, climate control systems, and radio navigation systems. They comply with the following standards:
- CAN Stack: OSEK-COM 3.0.3, OSEK-NM 2.5.2, ISO-TP 15765-2, and ISO-UDS 14229-1.
- LIN Stack: LIN specification 2.0, 2.1, and 2.2A, and ISO-UDS 14229-1. Both Master and Slave modes are supported.
- CAN Bootloader: Compliant with OSEK-COM 3.0.3, ISO-TP 15765-2, and ISO-UDS 14229-1.
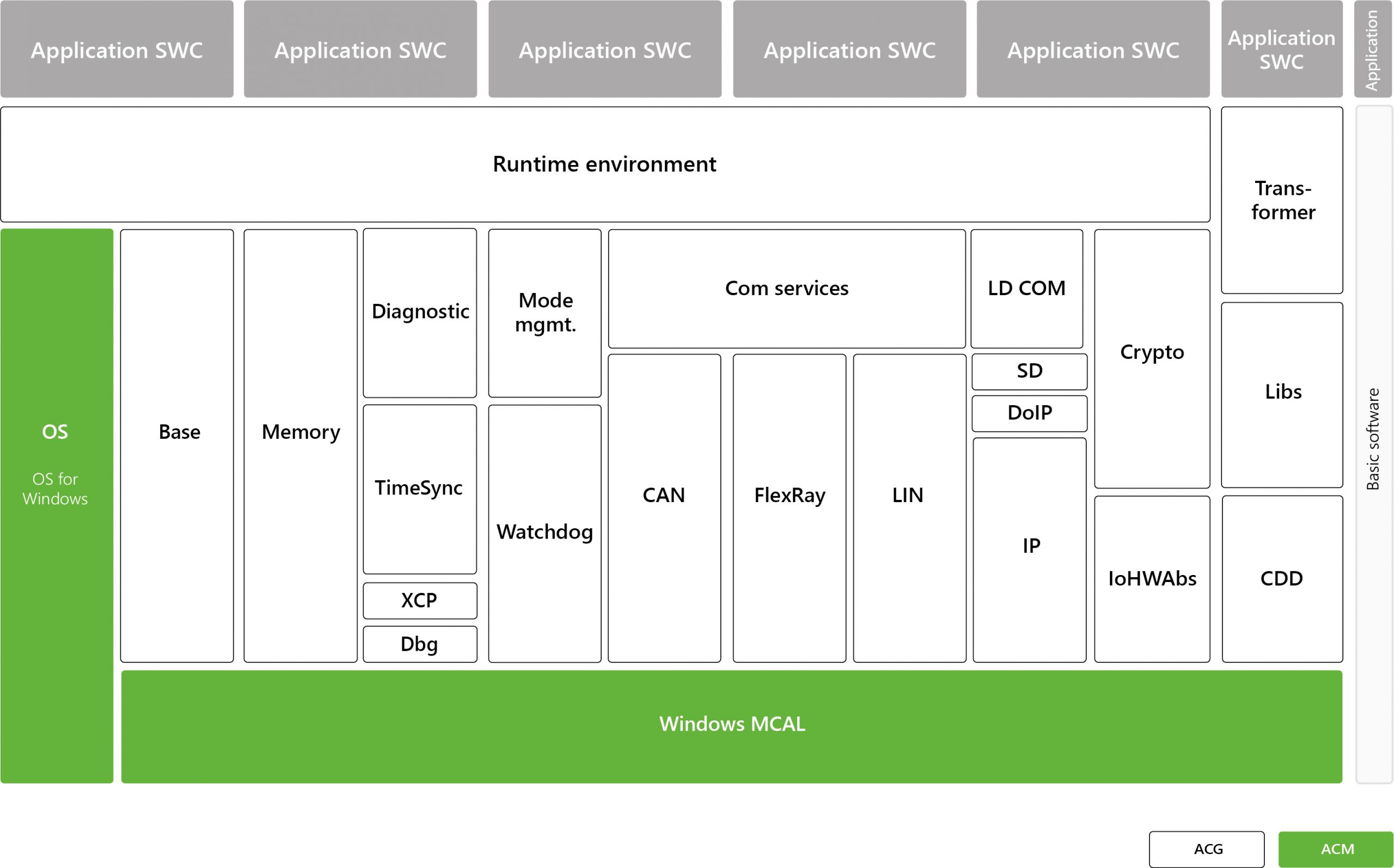
PC-based AUTOSAR development
We want you to be able to test your AUTOSAR software and its integration as early as possible and as quickly as possible. That’s why we developed our virtual Classic AUTOSAR basic software, EB tresos WinCore, which runs on a Win32 platform. That means that you can start your electronic control unit (ECU) software project even without hardware and run your application directly on your PC.
Extended quality statement
Consists of quality and metrics report as well as safety application guidelines for the OS and RTE. The quality and metrics report provides information on requirements tracing, test reports, static, and dynamic code analysis. The information can be used to support a safety argumentation up to ASIL B.
Related content to Elektrobit’s Classic AUTOSAR Basic Software (BSW)