- Products
- |
- Automated driving
- |
- EB robinos
- |
- EB robinos Predictor
- |
- EB robinos Predictor..
ADASIS electronic horizon Provider
EB robinos Predictor Eval Kit
Reliable and ready for your research, development and testing activities
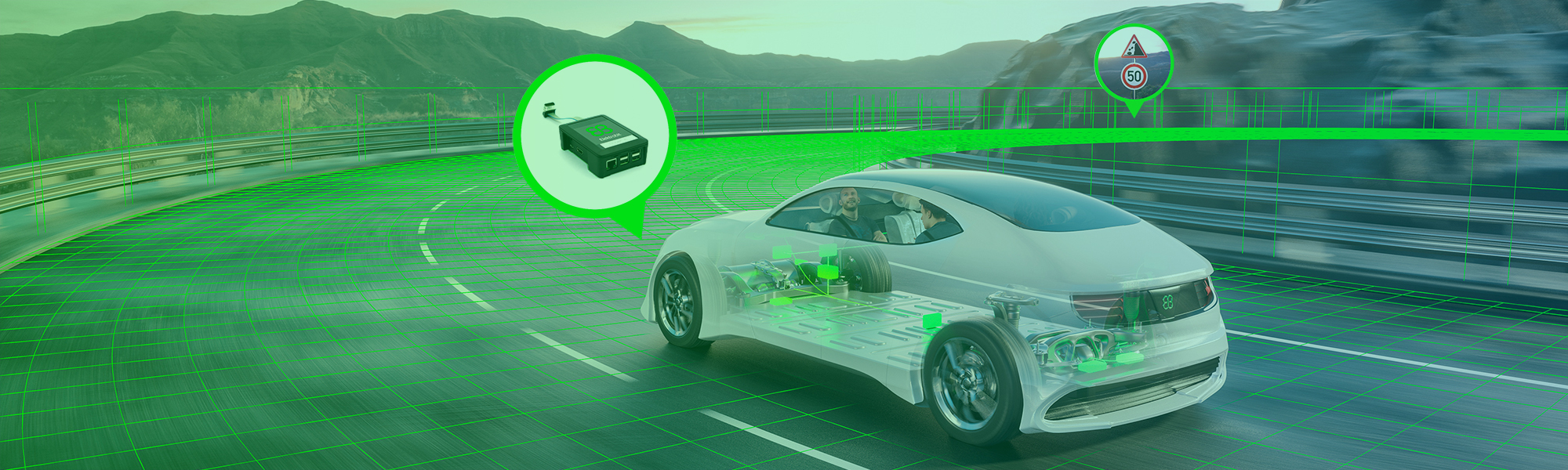
The EB robinos Predictor Eval Kit is a Raspberry Pi device running the EB robinos Provider
for ADASIS v2 or v3.
Check out this Web App and start using EB robinos Predictor Eval Kit without complex installation or configuration.
Get your EB robinos Predictor Eval Kit now
Here’s what you’ll get:
Out-of the-box solution
Plug & Play electronic horizon for your vehicles and test environments.

Easy configuration and control
Web interface to easily configure electronic horizon output.
Reduced space
Compact hardware dimensions.
Software updates
Regular software and map updates.
Highlights of our ADASIS Provider
- Simulate test drives on any route
- Visualize driven path
- Configure your ADASIS Provider
– Connection settings
– Map regions (EU, NAR, Custom)
– ADASIS protocol settings - Connect your computer via Wi-Fi or LAN
- Record and replay test drive tracks
- Use included GNNS receiver or CAN/UDP input as a positioning source
- Visualize Electronic Horizon tree with built-in reconstructor viewer
- Support for Commercial Vehicles

Product features
General features
- Playback for prerecorded test drive tracks
- Records of new test drive tracks
- ADASIS protocol settings
- Map selection
- Map visualization
- Provider software update function
- Built-in Reconstructor viewer
- Mobile and desktop view
ADASIS v2 features
- Supports NDS 2.5.x and lower databases
- Includes up-to-date HERE NDS maps for EU & NAR
- Transmits data via UDP or CAN
- Distributes the Most Probable Path (MPP)
- Provides CAN and UDP interfaces for position simulation
ADASIS v3 features
- Provides ADASIS v3.1 stream
- Supports latest HD online maps by HERE and TomTom
- Supports NDS.live
- Transmits data via TCP
- Distributes multiple MPPs based on different position candidates
- UDP interface for position simulation
ADASIS v3 – the standard format for HD maps and automated driving
To enable and/or enhance the functionalities of ADAS and automated driving systems, vehicle manufacturers want to access and use the information provided by navigation systems such as map data, vehicle position, and speed. Today, however, navigation map databases are only accessible to navigation applications and are stored in the proprietary format of the navigation system. For applications to access this data, an appropriate information exchange interface must be defined. This is the overall aim of ADASIS Forum.
Since 2018, EB provides the reference implementation of ADASIS v3 to ADASIS AISBL.
The advantages of ADASIS v3:
Further information on EB robinos and our automated driving solutions