
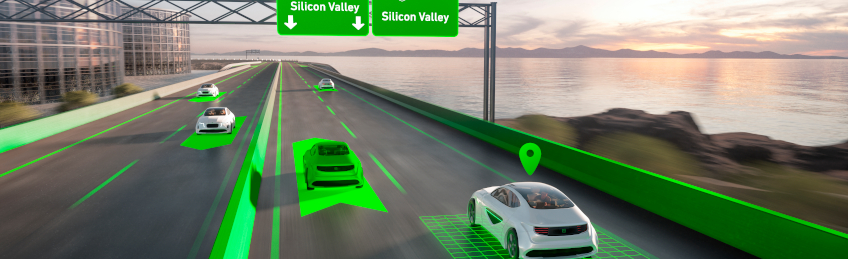
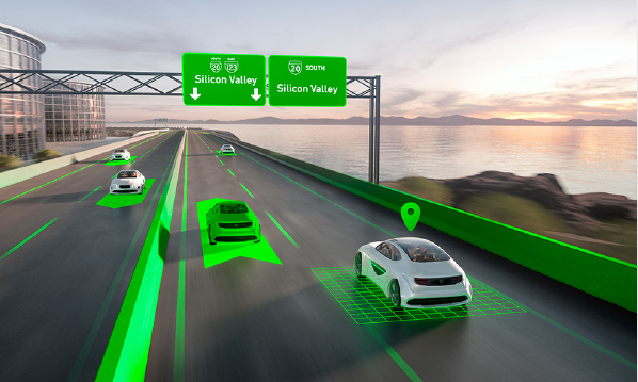
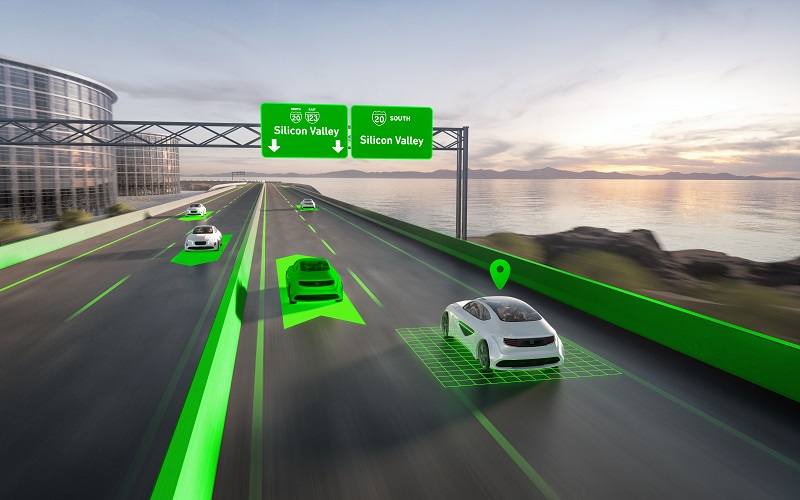
Make your vehicles aware of their surroundings and the road ahead
With EB robinos, we develop and provide key software to bring automated driving functions and systems to series production. The building blocks support assisted driving functions and enable the path to automated driving.
With our dedicated engineering services, we enable vehicles to gain a comprehensive view of their surroundings: we can develop a full environmental model software stack, specify their exact location with our highly precise positioning solution, and make them see beyond their sensor range with EB robinos Predictor, our holistic electronic horizon.
The standardized and modular approach behind the software we build defines a functional architecture and open interfaces between software components as well as external interfaces that greatly reduce complexity, effort, and costs, and allows higher competitiveness and thus better functions for the consumer at the same time.
Reduce development effort and expenses
We help you to create series production software within the vehicle to greatly lower development effort and expenses, allowing for higher competitiveness and thus better functions for your consumers at the same time.
Scalable with customer applications
We build modular components, we minimize development, application, and testing effort through component reuse. This allows for a cost-efficient and scalable solution.
Accelerating development
Our services and solutions save time and manpower to reinvent key components, are easily adaptable to the target, and can then be incorporated into existing customer subsystems.
Products and solutions regarding automated driving software

Electronic horizon
EB robinos Predictor
Electronic horizon solution for accurate and up-to-date information about the road ahead.

Precise positioning for ADAS
Positioning solution
Merging the vehicle’s interoceptive sensors, its exteroceptive sensors, and global map data for centimeter-precise positioning information.
Vehicle environment modeling
Environmental model
Dedicated engineering services to create fusion modules for a comprehensive environmental model.
Further information on EB robinos and our automated driving solutions
- Further information
- Training








EB HAD basics training
Duration: 1 day
Format: public training
Learn the fundamentals of EB robinos and the working principles of automated driving.
ADASIS training
Duration: 1 day
Format: in-house training
Learn how to leverage the ADASIS map specification for your electronic horizon projects. Understand the electronic horizon and the standard ADASIS protocols v2 and v3.



