
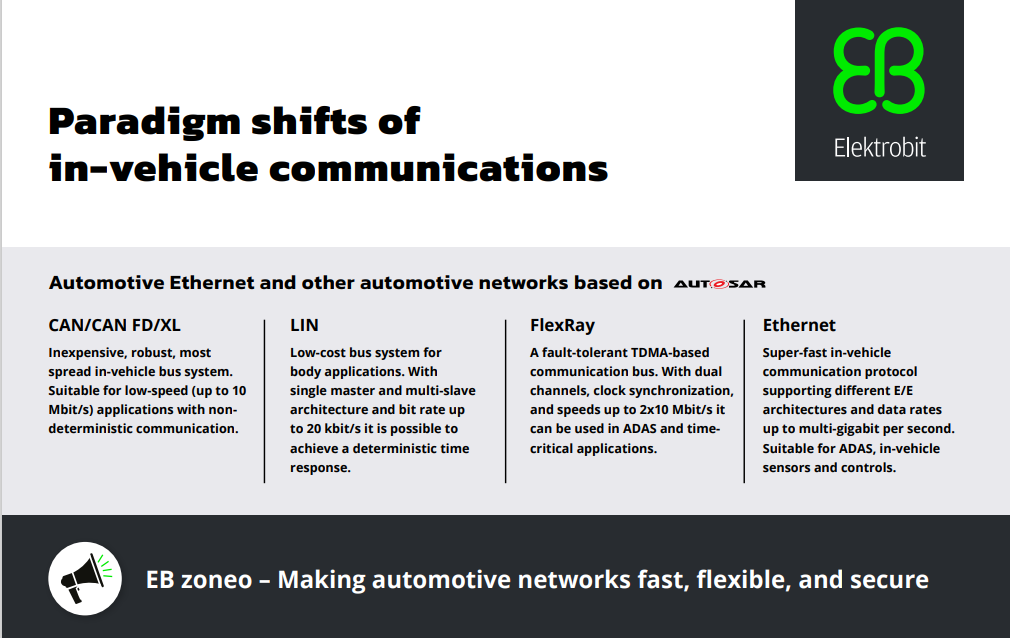
AUTOSAR-based communication interfaces for in-vehicle networks – CAN/CAN FD, LIN, FlexRay, and automotive Ethernet
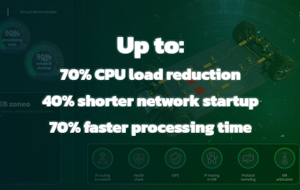
Megatrends such as automated driving, connected cars, smart devices, and e-mobility are on the rise, requiring scalable in-vehicle software architecture, dependable systems with more computing power, and solutions for fail-operational systems. The more systems are included in a vehicle network, the more complex the communication between the electronic control units (ECUs) becomes. There is a need for high bandwidth to support the increasing data transfer needs of future networks in the cars, such as automotive Ethernet can offer. Furthermore, hardware and software separation demands an independent execution of multiple environments on a single ECU opening a need for virtual machines.
Classic and Adaptive AUTOSAR-complementary Ethernet solutions
Elektrobit’s products support the whole range of architectures from domain-oriented to centralized, up to tomorrow’s zonal architectures. Thus, Elektrobit’s product portfolio is the solution for existing and future vehicle infrastructure design approaches. Elektrobit’s EB zoneo SwitchCore is an industry-first, intelligent automotive-grade switch firmware to handle the ever-increasing network functions to enhance the scalability, safety, and security of vehicles. The functionality of automotive Ethernet switches is boosted by implementing networking functions (routing, gateways, intrusion detection and prevention systems, etc.) as a switch firmware. Furthermore, EB zoneo VSwitch is a virtualization module that mimics switch functionalities to provide fast and reliable communication between virtual machines (VMs) and Ethernet networks. It helps the network communication to operate in an efficient and optimized way.
Integration into communication stacks based on Classic and Adaptive AUTOSAR
CAN, CAN FD, LIN, FlexRay, and Ethernet solutions are all seamlessly integrated into the communication stack of EB tresos AutoCore and EB corbos AdaptiveCore, which encompasses the AUTOSAR communication services for vehicle network communication. These solutions provide not only highly optimized performance, but also cover a very broad range of hardware devices, such as communication-specific transceivers and communication drivers.
Intrusion Detection and Prevention System (IDPS) for CAN and Ethernet
Together with PlaxidityX, Elektrobit offers coupled network management and cybersecurity for CAN and Ethernet communication stacks. Extension of IDPS allows the early detection and prevention of external attacks for in-vehicle networks. EB zoneo SwitchCore Shield is an automotive-grade switch firmware in combination with the Ethernet IDPS library that is the winning combination for E/E architectures which require high performance, flexibility, and strong protection against cyber threats. PlaxidityX CAN IDPS brings together advanced security features for robust network protection – from ongoing monitoring to proactive intrusion detection and prevention mechanisms.
AUTOSAR-ready Ethernet
Elektrobit’s automotive IP/Ethernet basic software solutions are embedded in the AUTOSAR-based EB tresos AutoCore and EB corbos AdaptiveCore product family.
Strong network in the industry
Elektrobit cooperates with car makers to create specifications and implementations of innovative new methods such as service-based architectures, time-sensitive networks, or automotive plug and play.
Ethernet testing
Providing a high-quality level for implementation, ensured by extensive Ethernet conformance tests.
CAN LIN, FlexRay, J1939
Series-production-approved network communication solutions for CAN, CAN FD, LIN, FlexRay, and SAE J1939.
CAN, CAN FD, LIN, FlexRay, and Ethernet features
Maximum flexibility with solutions for signal- and service-based communication
-
Signal-based network communication paradigm (CAN/CAN FD, FlexRay)
Current automotive networks follow a signal-based communication paradigm. This method of communication typically involves the transmission of short messages with individual, densely packed values (signals). They are broadcast to all network nodes and forwarded to interested applications via efficient filters.
-
Service-based network communication paradigm (Ethernet)
The Ethernet’s high bandwidth enables the use of service-based communication. This provides a flexible and scalable method to handle the increasing complexity of signals exchanged within the car. In contrast to the well-proven signal-based method, the service-based version uses a subscription-based way of data exchange.
Time-sensitive control data exchange
- Extending Ethernet with time-sensitive networking will enable new automotive applications that not only require a higher bandwidth, but also guarantee worst-case latencies and global time-base synchronization and reliability between the ECUs. Elektrobit supports time-sensitive technologies such as Audio Video Bridging (AVB) and the application protocols on top of it such as Audio Video Transport Protocol (AVTP) and others.
Related content to automotive ethernet network solutions
- Further information
- Training











EB tresos automotive Ethernet training
Duration: 3 days
Format: in-house and public training
This course introduces you to the physical layers, communication protocols, and how Ethernet is standardized in AUTOSAR. Learn how to build a demo application that runs on the Windows environment with EB tresos ACG.

